Contexte du projet
Dans le cadre du projet PEDSIVAL, cette simulation VR a été conçue pour étudier le comportement des piétons en situation de traversée de route. L'objectif est de reproduire des conditions réalistes et contrôlées afin de mener des expérimentations sans risque réel.
Aperçu

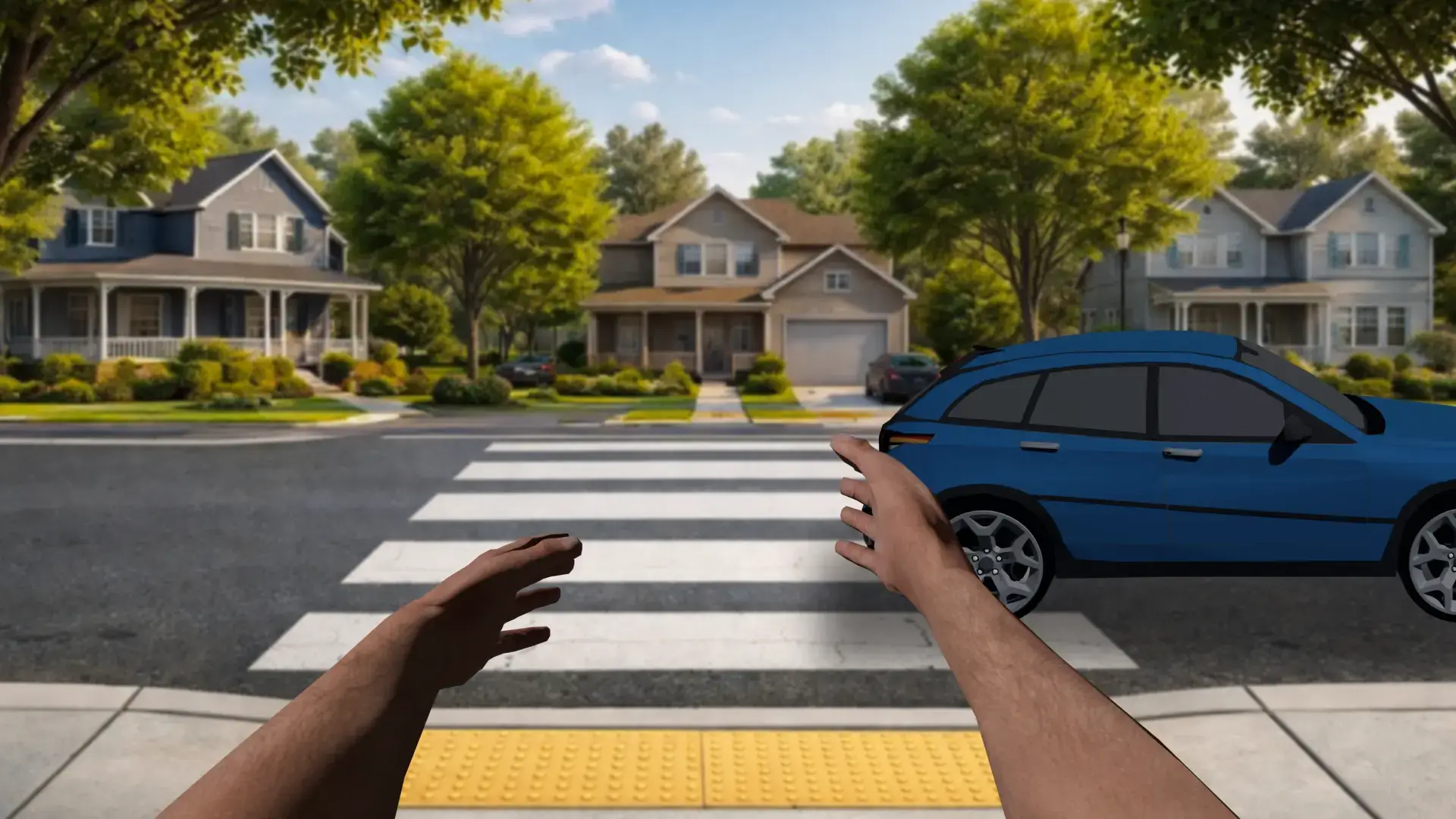
Objectifs & défis
Reproduction fidèle des mouvements utilisateurs via un self-avatar en temps réel
Intégration d’un tracking corporel avancé (HTC Vive + trackers ceinture et pieds)
Simulation de trafic réaliste avec comportements dynamiques
Maintien de performances élevées (90 FPS constants) pour éviter le motion sickness
Développement
Développée sous Unity avec SteamVR, l’application repose sur un système de tracking corporel complet utilisant des trackers HTC Vive (ceinture, pieds) couplés à de la cinématique inverse pour reproduire fidèlement les მოძრაობements du joueur via un self-avatar. L’environnement routier dynamique intègre des véhicules avec comportements simulés et des scénarios reproductibles pour les protocoles expérimentaux d’IFSTTAR. L’ensemble est optimisé pour garantir un framerate stable à 90 FPS.